Jeg har afsluttet grundforløb 2 med stor ros fra underviser, med yderligere besked om, at altid være så innovativ som afslutningsopgaven.
Vi skal lave en opsætning, der kunne skubbe et element fra et transportbånd over til et andet og så køre dette element den ene eller den anden vej, alt efter om emnet var metal eller plastik.
Som den eneste gruppe, valgte vi, at bruge en drejecylinder til at trække en arm med en sugekop på, vakuum generatoren måtte vi selv fremstille, så det gjorde vi, den virkede perfekt. Styringen af opsætningen skulle være en blanding af både relæteknik og PLC, hvilket vi fik til at fungere helt som planlagt.
For at få de to transportbånd og armen til at fungere sammen, skulle vi lave en form for sluse, der sørgede for, at emnet altid ramte samme punkt på båndet. Den første prototype blev bygget op med lego technics, den viste med stor tydelighed, at vores udgangspunkt var det helt rigtige. Dernæst fik vi udarbejdet en 3D model i solidworks, som blev 3D printet, først en hurtig model og senere en udførlig og solid model. Det viste sig, at vores opsætning og styring var så præcis, at selv den hurtige model fungere helt efter hensigten.
 |
| De 3 iterationer af slusen, Lego udgaven, 1. print og slutprintet. Den lille hvide klods er vores vakuum generator. |
Selve opsætningen af de to transportbånd samt armen ses på de følgende billeder.
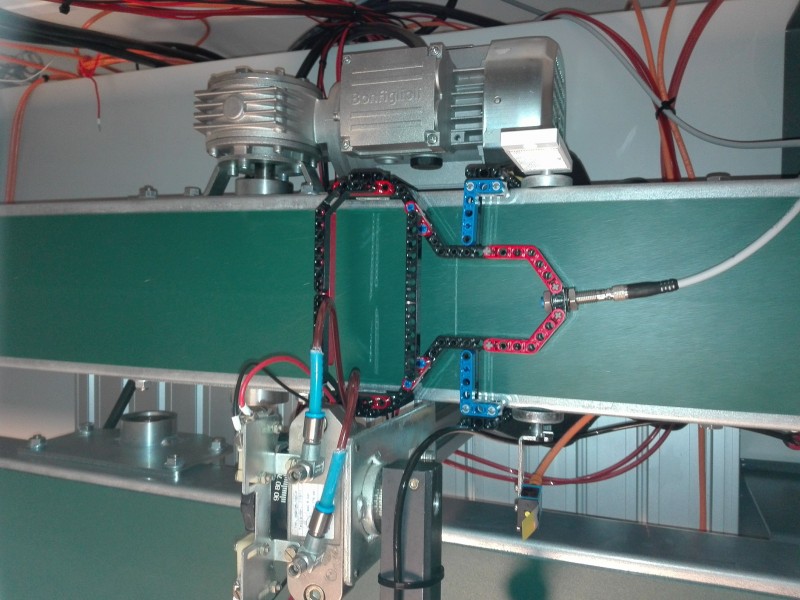 |
| Armen, lidt ude af billedet samt slusen. Bemærk, de 2 fittings på armen, hvor vi var nød til, at lave ekstra tilpasning af slagerne. |
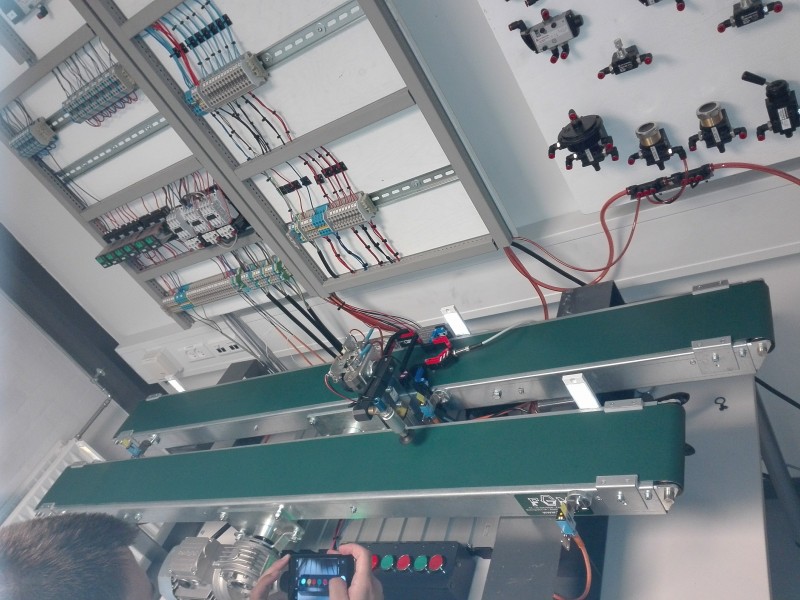 |
| Hele opsætningen samt tavler med relæ, pneumatic og PLC styring i baggrunden. |
| Videon her viser vores opsætning |